Class PenaltyBarrierU_tan2¶
Defined in File PenaltyBarrierU.cc
Inheritance Relationships¶
Base Type¶
public Mechatronix::PenaltyBarrierU_base(Class PenaltyBarrierU_base)
Class Documentation¶
-
class
Mechatronix::PenaltyBarrierU_tan2: public Mechatronix::PenaltyBarrierU_base¶
-
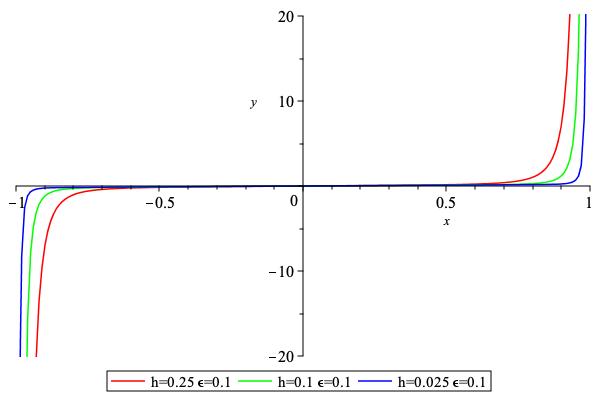
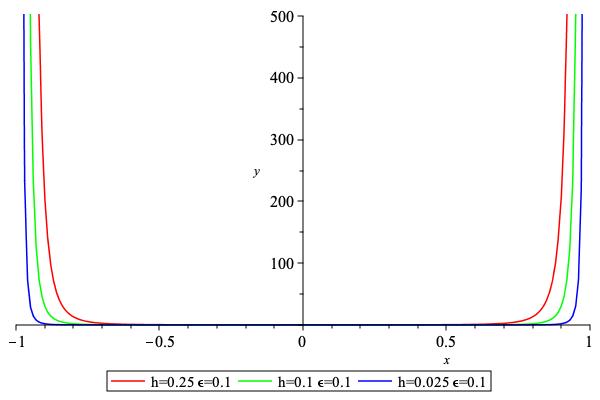
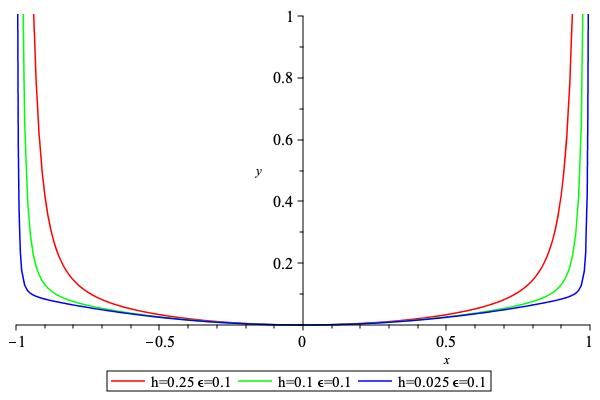
Squared Tangent barrier.
Public Functions
-
inline
PenaltyBarrierU_tan2(string const &name)¶
-
Construct the barrier.
-
inline virtual void
setup(real_type epsilon, real_type tolerance) override¶
-
Initialize the barrier internal parameters based on the values of \( h \) and \( \epsilon \)
for \( h \) and
vars[name()+"Epsi"]for \( \epsilon \)Set the internal parameter
\[ C = \frac{\epsilon}{2\left(\tan\left(\displaystyle\frac{\pi}{2}(1-h)\right)\right)^2} \]based on the values of \( h \) and \( \epsilon \)
- Parameters
-
epsilon – [in] value \( \epsilon \)
tolerance – [in] value \( h \)
-
inline virtual real_type
eval(real_type x) const override¶
-
Compute the barrier
\( p(x) = C\left[\tan\left(\frac{\pi}{2}x\right)\right]^2+\frac{\epsilon}{2}x^2 \)
-
inline virtual real_type
solve(real_type RHS) const override¶
-
Solve the problem \( p'(x) = r \)
The solution is iterative.
-
inline