Class PenaltyBarrierU¶
Defined in File PenaltyBarrierU.hh
Class Documentation¶
-
class
Mechatronix::PenaltyBarrierU¶
-
Class for penalize control.
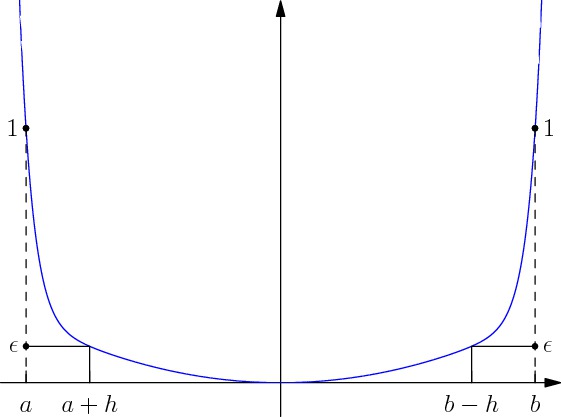
The penalty is defined in the interval \( [a,b] \) with two parameters \( \epsilon \) and \( h \).
The interval \( [a,b] \) is the range where the control must lie.
The parameter \( h \) is the distance from the border of the interval where the penalty start to grow fast.
The parameter \( \epsilon \) is the value of the penalty at distance \( h \) from the border.
Public Types
Public Functions
-
inline explicit
PenaltyBarrierU(string const &name)¶
-
Construct a penalty for control with name
name
-
inline
~PenaltyBarrierU()¶
-
Destroy the penalty for control.
-
void
setup(integer type, real_type epsilon, real_type tolerance)¶
-
build penalty of type
typeBuild a penalty for the control. The Associative array
varsmust containNAME + “Type” where NAME is the name of the class used in the constructor.
NAME + “Tolerance” the value of \( h \)
NAME + “Epsi” the value of \( \epsilon \)
The possible value of the type are
QUADRATIC: For the penalty PenaltyBarrierU_quadratic
QUADRATIC2: For the penalty PenaltyBarrierU_quadratic_bis
CUBIC: For the penalty PenaltyBarrierU_cubic
QUARTIC: For the penalty PenaltyBarrierU_quartic
PARABOLA: For the penalty PenaltyBarrierU_parabola
LOGARITHMIC: For the barrier PenaltyBarrierU_logarithmic
COS_LOGARITHMIC: For the barrier PenaltyBarrierU_cos_logarithmic
TANGENT2: For the barrier PenaltyBarrierU_tan2
HYPERBOLIC: For the barrier PenaltyBarrierU_hyperbolic
BIPOWER: For the barrier PenaltyBarrierU_bipower
PenaltyBarrierU P("P1"); real_type tolerance = 0.1; real_type epsilon = 0.01; P.setup( PenaltyBarrierU::QUADRATIC, epsilon, tolerance );
-
inline void
setup(GenericContainer const &GC)¶
-
build penalty
-
inline void
update_epsilon(real_type epsilon)¶
-
change the epsilon of the control, used in the continuation
-
inline void
update_tolerance(real_type tolerance)¶
-
change the tolerance of the control, used in the continuation
-
inline void
info(ostream_type &stream) const¶
-
print information about the penalty on stream
s
-
inline string
info() const¶
-
inline void
save(string const &fname) const¶
-
save on a file
fnamethe actual penalty values evaluted in the interval[a,b]
-
inline real_type
operator()(real_type x, real_type a, real_type b) const¶
-
Compute the penalty \( p(x,a,b) \).
-
inline real_type
D_1(real_type x, real_type a, real_type b) const¶
-
Compute \( \displaystyle\frac{\partial}{\partial_x} p(x,a,b) \).
-
inline real_type
D_2(real_type x, real_type a, real_type b) const¶
-
Compute \( \partial_a p(x,a,b) \).
-
inline real_type
D_3(real_type x, real_type a, real_type b) const¶
-
Compute \( \partial_b p(x,a,b) \).
-
inline real_type
D_1_1(real_type x, real_type a, real_type b) const¶
-
Compute \( \partial_{xx} p(x,a,b) \).
-
inline real_type
D_1_2(real_type x, real_type a, real_type b) const¶
-
Compute \( \partial_{xa} p(x,a,b) \).
-
inline real_type
D_1_3(real_type x, real_type a, real_type b) const¶
-
Compute \( \partial_{xb} p(x,a,b) \).
-
inline real_type
D_2_2(real_type x, real_type a, real_type b) const¶
-
Compute \( \partial_{aa} p(x,a,b) \).
-
inline real_type
D_2_3(real_type x, real_type a, real_type b) const¶
-
Compute \( \partial_{ab} p(x,a,b) \).
-
inline real_type
D_3_3(real_type x, real_type a, real_type b) const¶
-
Compute \( \partial_{bb} p(x,a,b) \).
-
inline real_type
solve(real_type RHS, real_type a, real_type b) const¶
-
Solve the problem \( \displaystyle\frac{\partial}{\partial_x} p(x,a,b) = RHS \).
-
inline real_type
solve_rhs(real_type RHS, real_type a, real_type b) const¶
-
Given the function \( x(r,a,b) \) defined implicitly as the solution \( \displaystyle\frac{\partial}{\partial_x} p(x(r,a,b),a,b) = r \) compute the derivative \( \partial_r x(r,a,b) \)
Protected Functions
Protected Attributes
-
string const
m_name¶
-
name of the penalty
-
PenaltyBarrierU_base *
m_pPenalty¶
-
pointer to the true used penalty